Research
Research & Publications
13 publications spanning risk-aware machine learning, uncertainty quantification, and multi-robot autonomy — the research thread now applied to reliable AI at Themis AI.
Journal Articles
- 2024
Finding the optimal exploration-exploitation trade-off online through Bayesian risk estimation and minimization
Artificial Intelligence (Vol. 330)
DOI
Conference Papers
- 2024
Discovering Biological Hotspots with a Passively Listening AUV
2024 IEEE International Conference on Robotics and Automation (ICRA)
PDF - 2023
CUREE: A Curious Underwater Robot for Ecosystem Exploration
2023 IEEE International Conference on Robotics and Automation (ICRA)
DOILink - 2023
DeepSeeColor: Realtime Adaptive Color Correction for Autonomous Underwater Vehicles via Deep Learning Methods
2023 IEEE International Conference on Robotics and Automation (ICRA)
arXivDOIVideo - 2021
Multi-Robot Distributed Semantic Mapping in Unfamiliar Environments through Online Matching of Learned Representations
2021 IEEE International Conference on Robotics and Automation (ICRA)
arXivDOIVideo - 2020
Active Reward Learning for Co-Robotic Vision Based Exploration in Bandwidth Limited Environments
2020 IEEE International Conference on Robotics and Automation (ICRA)
★ Best Paper Award in Service RoboticsarXivDOIVideo - 2019
Streaming Scene Maps for Co-Robotic Exploration in Bandwidth Limited Environments
2019 IEEE International Conference on Robotics and Automation (ICRA)
arXivDOI
Workshop Papers
- 2023
- 2021
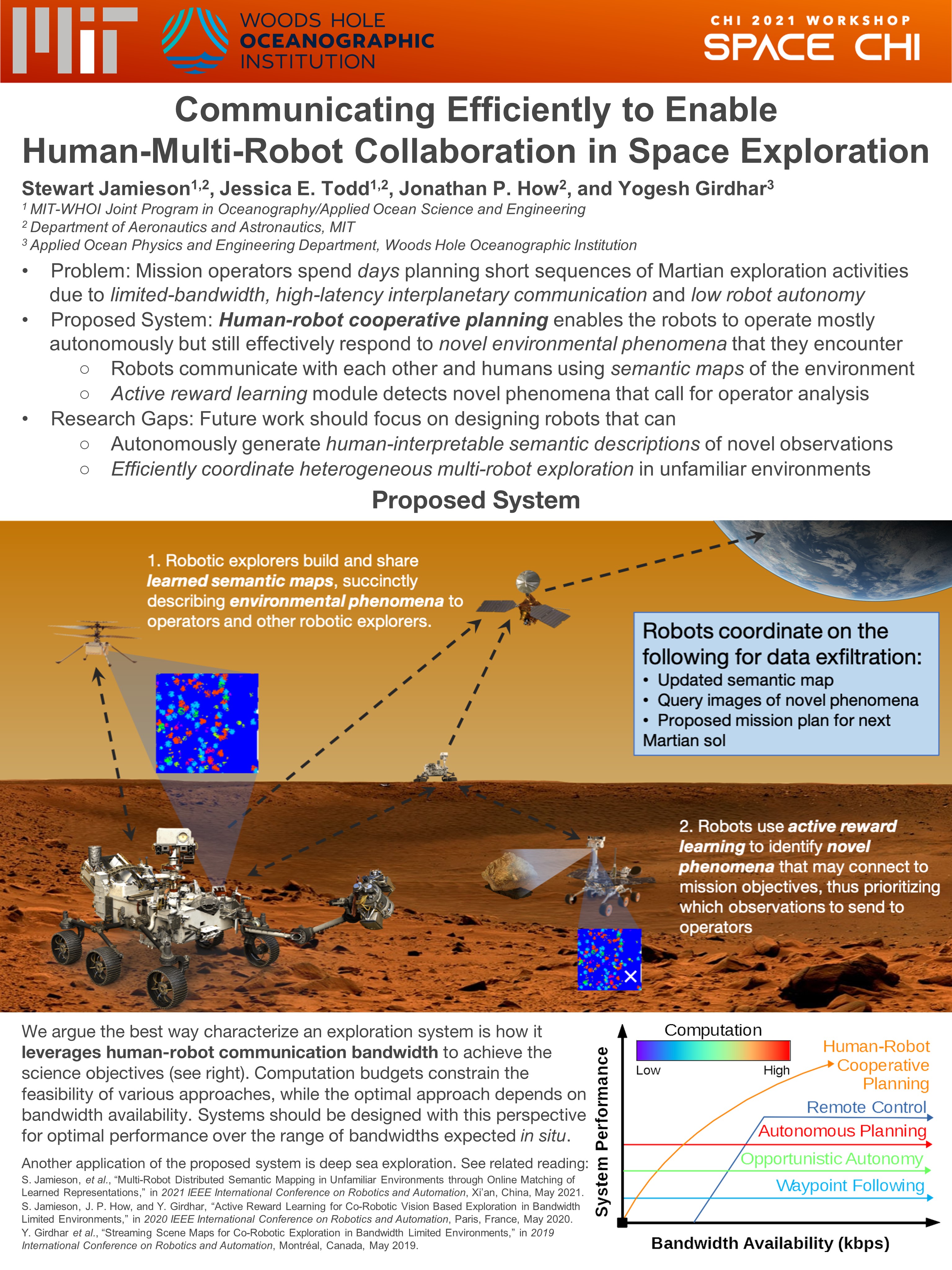
Communicating Efficiently to Enable Human-Multi-Robot Collaboration in Space Exploration
SpaceCHI: HCI for Space Exploration Workshop, CHI 2021
PDFPoster - 2019
The Pervasiveness of Deep Learning in Robotics Research Does Not Impede Scientific Insights into Robotics Problems
Debates on the Future of Robotics Research Workshop, ICRA 2019
PDF
{kind=link}
Theses
- 2024
Enabling Human-Multi-Robot Collaborative Visual Exploration in Underwater Environments
Ph.D. Thesis, MIT & Woods Hole Oceanographic Institution
PDF - 2020
Enabling Human-Robot Cooperation in Scientific Exploration of Bandwidth-Limited Environments
S.M. Thesis, MIT & Woods Hole Oceanographic Institution
PDFDOI - 2018
Deep Learning for Robust Vision in Realtime Autonomous Driving
B.A.Sc. Thesis, University of Toronto