Abstract
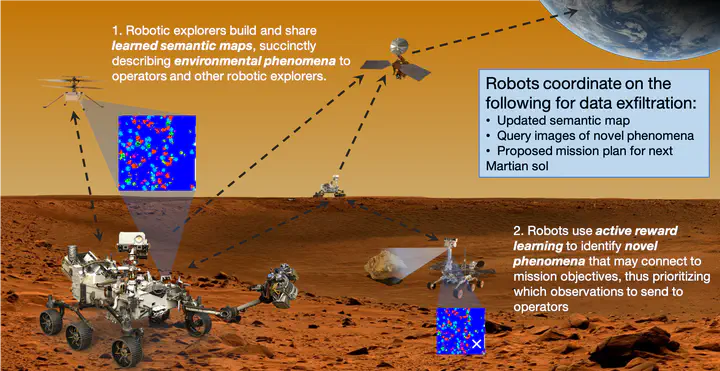
The future of deep space exploration demands a shift in the current paradigm of robotic planetary exploration. Mission Operators on Earth spend days planning just short sequences of robotic exploration activities on Mars due to the limited-bandwidth, high-latency interplanetary communications and low levels of robot autonomy. We propose deploying robots that perform unsupervised semantic mapping of their environments as well as active learning to improve the efficiency of data exchange and activity planning between robots and human operators. Robots that build and transmit high-level semantic maps and learn by querying operators on the science objectives of the mission can improve mission productivity. Multi-robot space missions may utilize similar methods to efficiently communicate between different robotic assets. As robot exploration teams become larger and heterogenous, the sophistication of human-robot and multi-robot cooperation should grow with them.
Stewart Jamieson
PhD Candidate
My research interests include semantic mapping and path planning for multi-agent underwater robotic systems.